강체 시뮬레이션에서의 수치적분
〈가상현실〉 수업 노트
<강체 시뮬레이션>에서 확인할 수 있듯, 강체의 운동을 처리하는 데에는 적분 계산이 요구된다.
계산기에서는 적분 계산에 있어 방정식을 해석적으로 풀 수 없으므로, 적분 대상을 잘게 나누어 근사적으로 계산하는 수치적분 방법을 사용한다.
\[\begin{aligned} v = \int a \, dt &\approx \sum_{i}{a_i} \Delta t \\ x = \int v \, dt &\approx \sum_{i}{v_i} \Delta t \end{aligned}\]오일러 방법
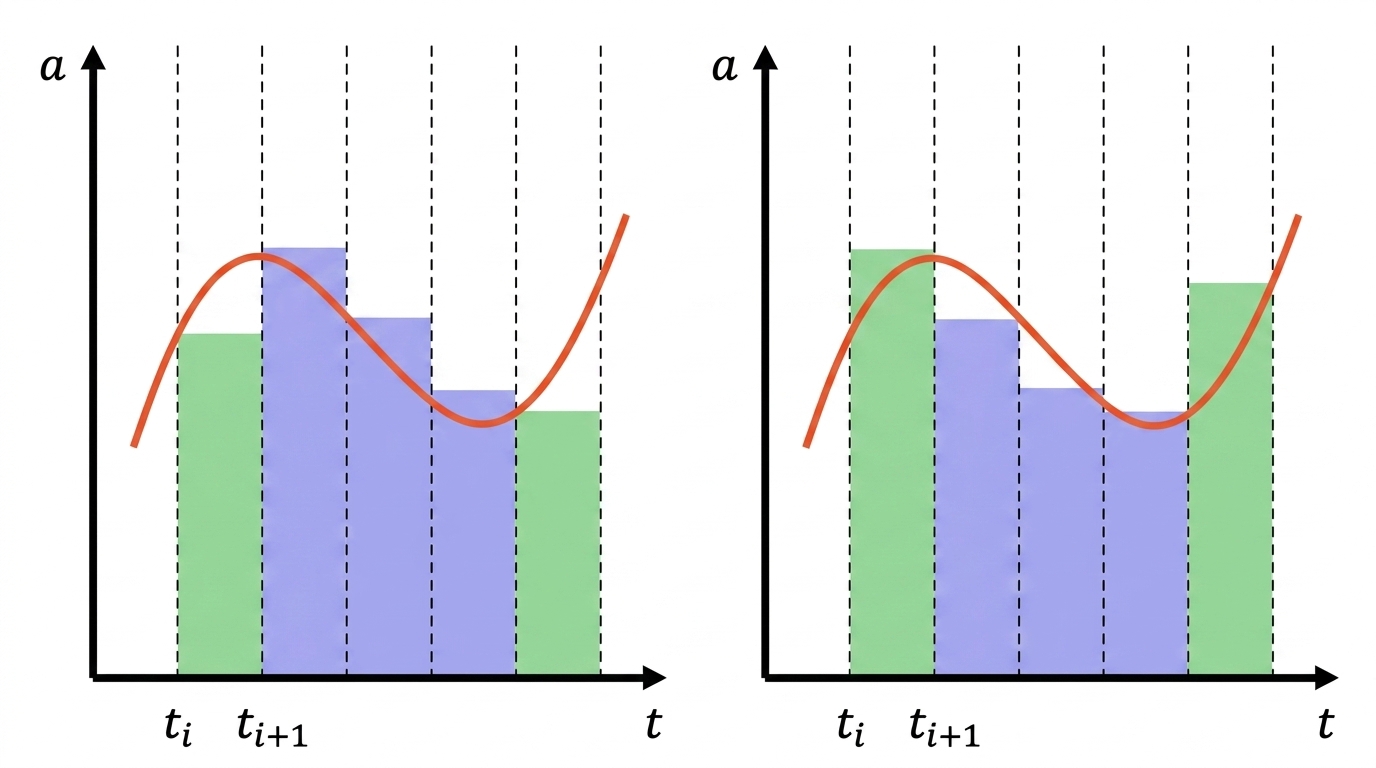
전진 오일러 방법(좌)과 후진 오일러 방법(우)
오일러 방법은 가장 간단한 수치적분 방법으로, 크게 두 가지 방법을 사용할 수 있다. 전진 오일러 방법(Forward Euler method, 외삽법; Explict method라고도 함)과 후진 오일러 방법(Backward Euler method, 내삽법; Implicit method라고도 함)이 있다.
전진 오일러 방법의 정의
후진 오일러 방법의 정의
전진 오일러 방법
전진 오일러 방법은 현재 시간을 기준으로, 후진 오일러 방법은 다음 시간을 기준으로 잘게 자른 시간 간격 $\Delta t$ 동안의 가속도 $a$ 와 속도 $v$ 를 사용하여 적분 계산을 수행한다.
전진 오일러 방법은 계산이 간단하지만, 시간이 진행됨에 따라 오차가 누적되어 시뮬레이션이 불안정해진다.
아래 식과 같이 강체에 힘을 가하는 상황에서, 전진 오일러 방법을 사용하여 시뮬레이션을 수행할 때, 시뮬레이션이 불안정해지는 것을 확인할 수 있다.
\[y = - \frac{1}{2} g t^2 + 10, \quad g = 2\] \[\dot{y}_{i + 1} = \dot{y}_i - g \Delta t, \quad y_{i + 1} = y_i + \dot{y}_i \Delta t\]| $t$ | exact $y$ | $y_i$ | $\dot{y}_i$ | $\Delta$ |
|---|---|---|---|---|
| 0 | 10 | 10 | 0 | 0 |
| 1 | 9 | 10 | -2 | -1 |
| 2 | 6 | 8 | -4 | -2 |
| 3 | 1 | 4 | -6 | -3 |
| 4 | -6 | -2 | -8 | -4 |
이렇게 오차가 누적되면, 모델을 렌더링하는 경우에는 각 정점이 발산하여 모델이 터지듯 사라진다.
이전 시간 스텝과 다음 시간 스텝의 관계를 아래와 같이 정리할 때, 행렬 $A$ 가 단위 행렬보다 큰 경우, 시뮬레이션이 발산하는 것을 확인할 수 있다.
\[X_{t + 1} = A X_t\] \[\text{if} \left\| A \right\| > 1 \text{ then } X \text{diverges}\]따라서 위 식에서 행렬 $A$ 의 고유값(eigenvalue)의 크기(절댓값)가 1 이하인 경우($|\lambda| \le 1$)에만 시뮬레이션이 안정적으로 수렴한다.
후진 오일러 방법
후진 오일러 방법은 다음 시간을 기준으로 삼으면서, 전진 오일러 방법보다 계산이 복잡하다.
\[\begin{aligned} v_{t + 1} &= v_t + a_{t + 1} \Delta t \\ x_{t + 1} &= x_t + v_{t + 1} \Delta t \end{aligned}\] \[\begin{aligned} x_{t + 1} &= x_t + v_{t + 1} \Delta t \\ v_{t + 1} &= v_t + a_{t + 1} \Delta t \\ &= v_t + \left(- \frac{k (x_{t + 1} - x_0)}{m}\right) \Delta t \\ &= v_t - \frac{k \Delta t}{m} x_{t + 1} + \frac{k \Delta t}{m} x_0 \end{aligned}\]$x_{t + 1}$ 과 $v_{t + 1}$ 을 행렬 꼴 $s_{t + 1}$ 로 표현하면, 아래와 같이 $t + 1$ 과 $t$ 항으로 정리할 수 있다.
\[\begin{aligned} x_{t + 1} - v_{t + 1} \Delta t &= x_t \\ v_{t + 1} + \frac{k \Delta t}{m} x_{t + 1} &= v_t + \frac{k \Delta t}{m} x_0 \end{aligned}\] \[\begin{aligned} \begin{bmatrix} 1 & -\Delta t \\ \frac{k \Delta t}{m} & 1 \end{bmatrix} \begin{bmatrix}x_{t + 1} \\ v_{t + 1} \end{bmatrix} &= \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} \begin{bmatrix}x_t \\ v_t \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{k \Delta t}{m} x_0 \end{bmatrix} \end{aligned}\] \[\begin{aligned} S_{t + 1} &= \begin{bmatrix}x_{t + 1} \\ v_{t + 1} \end{bmatrix} \\ A S_{t + 1} &= B S_t + C \\ S_{t + 1} &= A^{-1} B S_t + A^{-1} C \end{aligned}\]행렬 $A$의 역행렬을 구하기 위해 행렬식을 계산하면 다음과 같다. $A$가 $2 \times 2$ 행렬이므로 역행렬 공식을 쉽게 적용할 수 있다. 수식의 편의를 위해 행렬식 $\det(A)$를 $D$로 치환한다.
\[\begin{aligned} D = \det(A) &= (1 \cdot 1) - \left(-\Delta t \cdot \frac{k \Delta t}{m}\right) = 1 + \frac{k \Delta t^2}{m} \\ A^{-1} &= \frac{1}{D} \begin{bmatrix} 1 & \Delta t \\ -\frac{k \Delta t}{m} & 1 \end{bmatrix} \end{aligned}\]$B$는 단위행렬이므로 전이 행렬 $A^{-1}B$는 $A^{-1}$과 같다.
\[\begin{aligned} A^{-1} B &= \frac{1}{D} \begin{bmatrix} 1 & \Delta t \\ -\frac{k \Delta t}{m} & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} \\ &= \begin{bmatrix} \frac{1}{D} & \frac{\Delta t}{D} \\ -\frac{k \Delta t}{m D} & \frac{1}{D} \end{bmatrix} \end{aligned}\]수렴하는 후진 오일러 방법
후진 오일러 방법은 전진 오일러 방법과 달리, 모델이 발산하지 않고 안정적으로 렌더링된다. 전진 오일러 방법에서는 점화식에서 시간에 의존하는 항 $x_{t}$, $v_{t}$ 혹은 $S_{t}$ 의 계수가 1보다 컸기 때문에, 모델링이 터지듯 발산했다.
앞에서 이렇게 산출한 후진 오일러 방법의 점화식 $S_{t + 1} = A^{-1} B S_t + A^{-1} C$ 의 고유값(eigenvalue) 크기는 1보다 작다. 특성 방정식 $\det(A^{-1} B - \lambda I) = 0$ 을 통해 이를 증명할 수 있다.
\[\det \begin{bmatrix} \frac{1}{D} - \lambda & \frac{\Delta t}{D} \\ -\frac{k \Delta t}{m D} & \frac{1}{D} - \lambda \end{bmatrix} = 0\] \[\begin{aligned} \left(\frac{1}{D} - \lambda\right)^2 - \left(\frac{\Delta t}{D}\right)\left(-\frac{k \Delta t}{m D}\right) &= 0 \\ \left(\frac{1}{D} - \lambda\right)^2 + \frac{k \Delta t^2}{m D^2} &= 0 \\ \left(\frac{1}{D} - \lambda\right)^2 &= - \frac{k \Delta t^2}{m D^2} \end{aligned}\]우변이 음수이므로 고유값 $\lambda$ 는 복소수 식으로 도출된다.
\[\begin{aligned} \frac{1}{D} - \lambda &= \pm i \frac{\sqrt{\frac{k}{m}} \Delta t}{D} \\ \lambda &= \frac{1 \pm i \sqrt{\frac{k}{m}} \Delta t}{D} = \frac{1 \pm i \sqrt{\frac{k}{m}} \Delta t}{1 + \frac{k \Delta t^2}{m}} \end{aligned}\]시뮬레이션이 안정적이려면 고유값의 크기(절댓값)가 1 이하여야 한다. 복소수 $\lambda = a + bi$ 의 크기 제곱 $|\lambda|^2 = a^2 + b^2$ 이므로 다음과 같이 계산된다.
\[\begin{aligned} |\lambda|^2 &= \left( \frac{1}{1 + \frac{k \Delta t^2}{m}} \right)^2 + \left( \frac{\sqrt{\frac{k}{m}} \Delta t}{1 + \frac{k \Delta t^2}{m}} \right)^2 \\ &= \frac{1 + \frac{k \Delta t^2}{m}}{\left(1 + \frac{k \Delta t^2}{m}\right)^2} \\ &= \frac{1}{1 + \frac{k \Delta t^2}{m}} \end{aligned}\]질량 $m > 0$, 스프링 상수 $k > 0$, 시간 간격 $\Delta t > 0$ 이므로 $\frac{k \Delta t^2}{m} > 0$ 이다. 따라서 분모가 무조건 1보다 작아지는 사례는 존재하지 않는다. 고유값의 크기는 항상 1보다 작다.
\[|\lambda|^2 < 1 \quad \Rightarrow \quad |\lambda| < 1\]이 증명을 통해 후진 오일러 방법은 $\Delta t$ 의 크기와 무관하게 고유값의 크기가 항상 1보다 작으므로, 시뮬레이션이 무조건적으로 안정적임을 알 수 있다.