강체 시뮬레이션
〈가상현실〉 수업 노트
도입
\[M \ddot{X} + C \dot{X} + K X = \sum{F_\text{external}}\]강체 시뮬레이션에서 지배 방정식
가상 세계에서 강체를 시뮬레이션하는 데 있어서, 현실 세계에서 물체 운동을 설명하는 지배 방정식을 사용한다. 질량 $M$, 감쇠 계수 $C$, 강성 $K$ 에 대해서 위와 같은 지배 방정식을 정의할 수 있다.
\[C \dot{X} + K X = F_\text{internal}\]강체는 6 자유도를 가진다. 3개의 병진 자유도 $(x, y, z)$ 와 3개의 회전 자유도(roll, pitch, yaw)가 있다. 따라서, 강체 시뮬레이션에서는 6차원 벡터 $X$ 를 사용하여 물체의 위치와 자세를 나타낸다.
회전 운동은 쿼터니언 표현 표현을 사용함에도 불구하고 3개의 회전 자유도를 갖는 것은, 쿼터니언이 단위 쿼터니언으로 정의되어, 세 개 변수 요소로 네 개 값을 결정하기 때문이다.
\[q = w + x i + y j + z k\] \[\sqrt{w^2 + x^2 + y^2 + z^2} = 1\]강체 시뮬레이션은 강체의 무게 중심을 기준으로 병진 운동과 회전 운동을 처리한다. 이렇게 가정함으로써, 강체의 병진 운동을 무게 중심에 모든 질량이 모여있는 질량 $m$ 의 입자가 위치 $x$ 에서 속도 $v$ 로 움직이는 것으로 단순화한다.
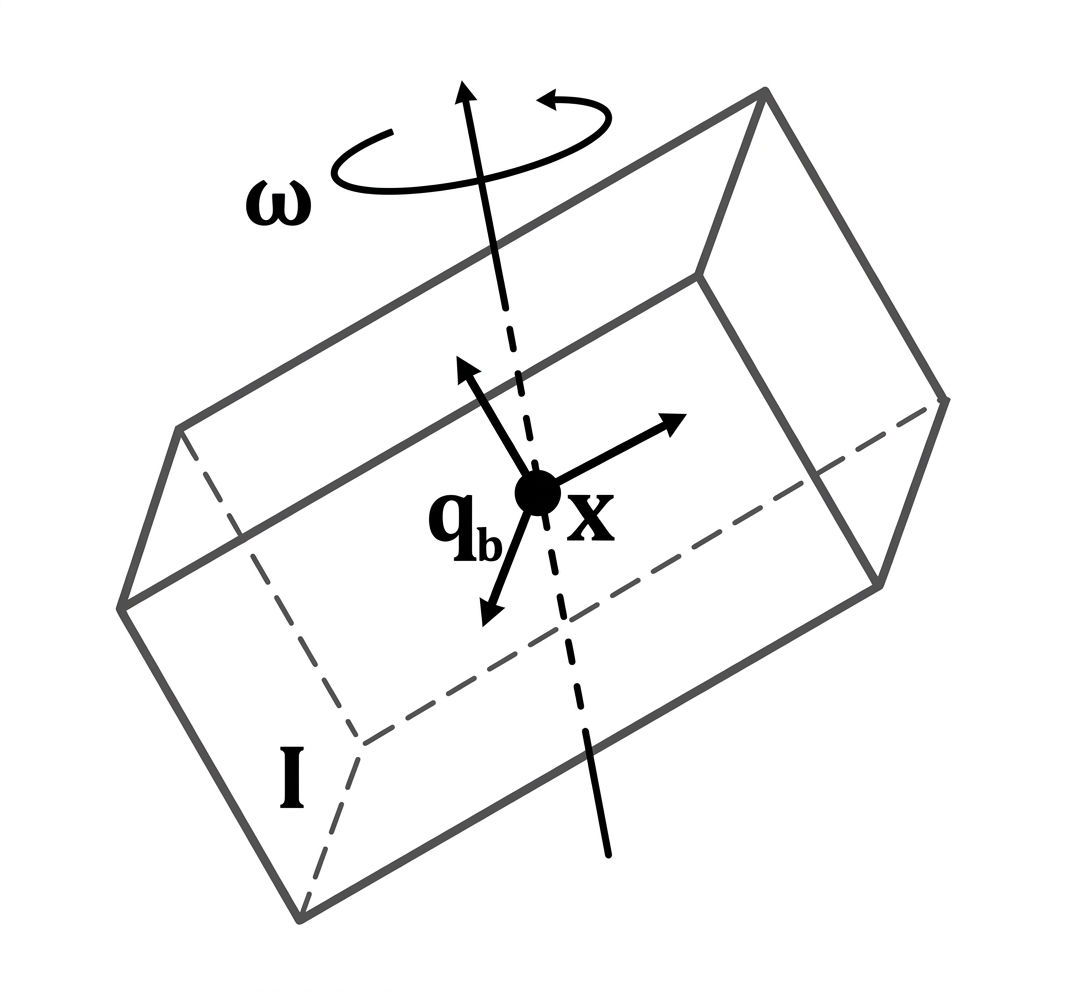
회전 운동은 회전 축으로부터의 거리에 따라 회전 속도가 변화하므로, 병진 운동과 같이 입자의 회전으로 가정할 수는 없다. 대신 회전이 발생하는 상황에 따라서는 무게 중심을 사용해 회전 축이나 회전 모멘트를 정의할 수 있다.
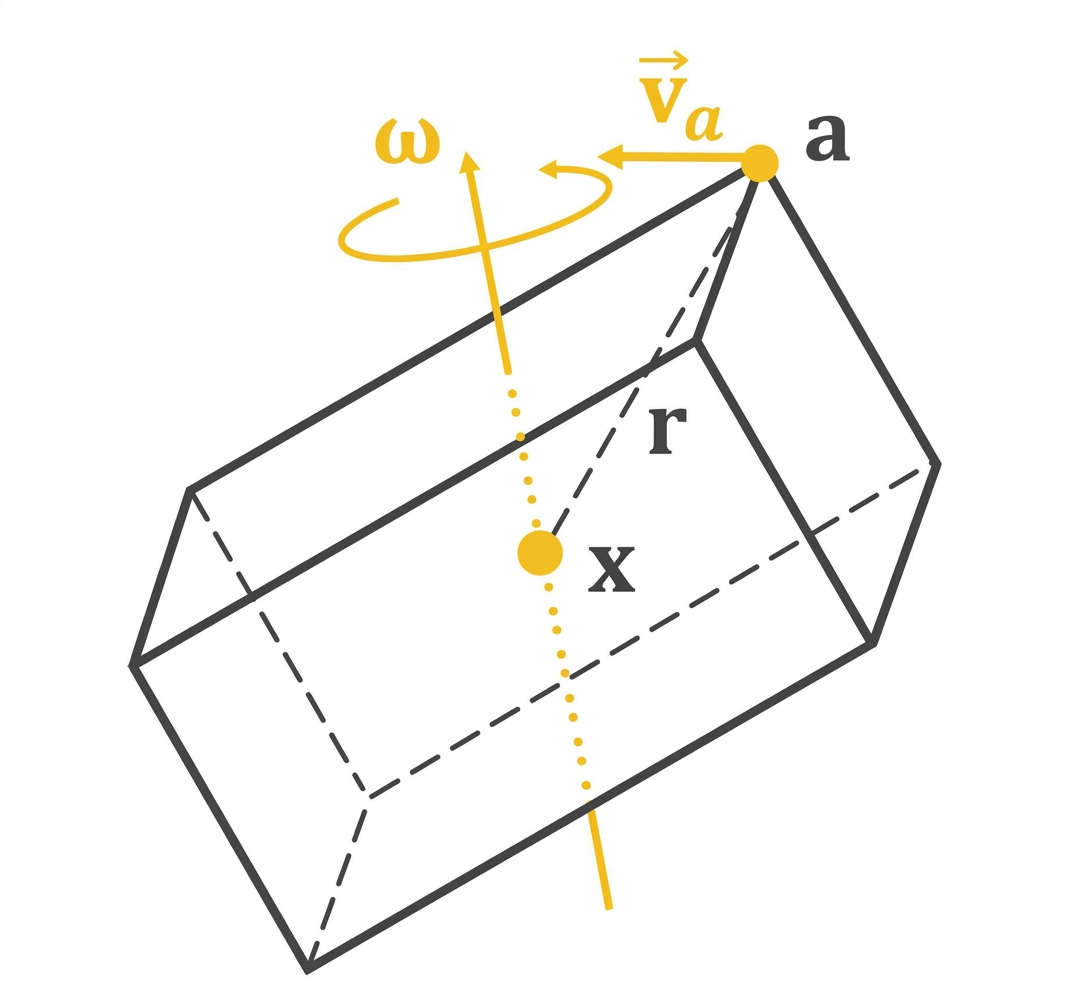
강체는 모든 부위가 동일한 각속도 $\omega$ 로 회전한다. 강체 위 한 점 $a$ 가 무게 중심으로부터 위치 벡터 $r_a$ 만큼 떨어져 있을 때, 회전에 의해 발생하는 점 $a$ 의 선속도 성분은 $\omega \times r_a$ 가 된다. 따라서 점 $a$ 에서 병진 운동을 포함한 전체 속도 벡터 $v_a$ 는 다음과 같이 얻을 수 있다.
\[v_a = v + \omega \times r_a\]관성과 관성 모멘트
| $$ \begin{aligned} f &= m a \\ a &= \frac{1}{m} \cdot f \end{aligned} $$ | $$ \begin{aligned} \tau &= I \alpha \\ \alpha &= I^{-1} \cdot \tau \end{aligned} $$ |
| 질량 $m$ (물체의 관성) | 관성 모멘트 $I$ |
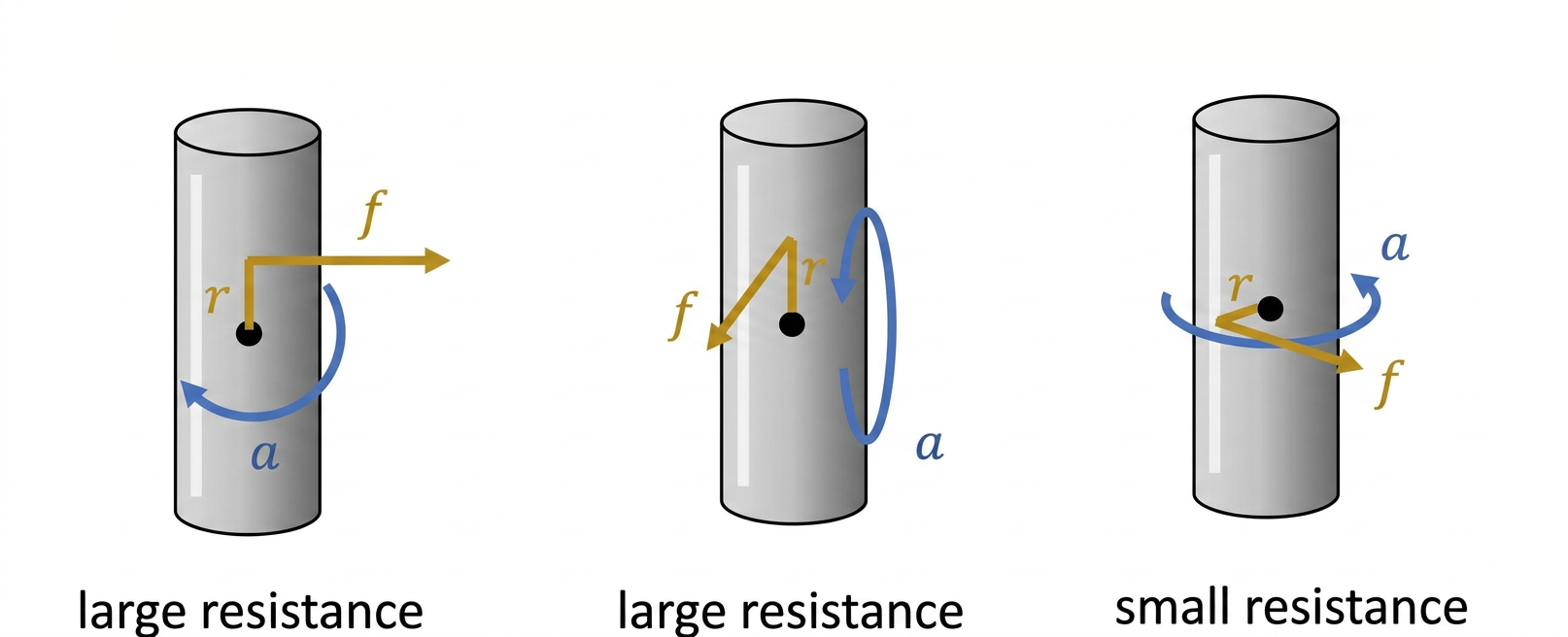
토크에 대한 저항은 같은 물체에 적용되더라도, 회전 축이 어떻게 설정되는지에 따라 달라진다. 회전축을 중심으로 물체를 절단했을 때 절단면이 넓을수록, 혹은 회전축에서 멀리 떨어진 질량이 많을수록, 관성 모멘트가 커진다.
\[\tau = I \alpha\]관성 모멘트 $I$ 는 회전축에 대해서 물체의 질량의 분포를 나타낸다. 물체를 구성하는 질량 $m$ 의 개별 미소질량 $dm$ 이 회전축으로부터의 거리 $r$ 에 대해 적분하여 관성 모멘트를 획득할 수 있다.
\[\begin{aligned} I &= \int r^2 dm \\ &= \int \int \int \rho r^2 dV \end{aligned}\]만약 물체의 질량 분포가 일정하다면 관성 모멘트는 행렬로 표현할 수 있다. 더 나아가, 회전축이 물체의 대칭 축과 일치한다면, 관성 모멘트는 대칭 축에 대한 질량 분포, 대각 행렬로 표현할 수도 있다.
\[I_\text{uniform} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{yx} & I_{yy} & I_{yz} \\ I_{zx} & I_{zy} & I_{zz} \end{bmatrix}\] \[I_\text{aligned} = \begin{bmatrix} I_{xx} & I_{0} & I_{0} \\ I_{0} & I_{yy} & I_{0} \\ I_{0} & I_{0} & I_{zz} \end{bmatrix}\]이렇게 회전하는 면에 얼마나 많은 축이 관여하는지, 어떤 도형인지에 따라서 관성 모멘트는 단순화할 수 있다.
직육면체의 관성 모멘트
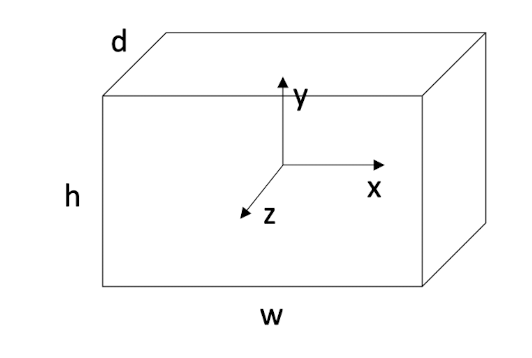
가로 단면 $w$, 세로 단면 $h$, 깊이 $d$ 인 직육면체의 회전은 $x$ 축, $y$ 축, $z$ 축을 기준으로만 회전할 때 아래와 같이 관성 모멘트를 계산할 수 있다.
밀도 $\rho$ 를 갖는 어떤 직육면체에 대해 $k$ 축을 중심으로 회전하고, 이 회전축에 수직인 두 축을 $u$, $v$ 축이라고 가정하면, 각 축 방향 길이를 $L_k$, $L_u$, $L_v$ 로, 직육면체의 무게 중심이 원점일 때 각 변수의 적분 범위를 $[-\frac{L_k}{2}, \frac{L_k}{2}]$, $[-\frac{L_u}{2}, \frac{L_u}{2}]$, $[-\frac{L_v}{2}, \frac{L_v}{2}]$, 전체 질량을 $m = \rho L_k L_u L_v$ 로 정리하고, 관성 모멘트 $I$ 를 구할 수 있다.
\[\begin{aligned} I_k &= \int \int \int \rho r^2 dV \\ &= \int \int \int \rho (u^2 + v^2) du dv dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \int_{-\frac{L_u}{2}}^{\frac{L_u}{2}} \int_{-\frac{L_v}{2}}^{\frac{L_v}{2}} (u^2 + v^2) du dv dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \int_{-\frac{L_u}{2}}^{\frac{L_u}{2}} \Big[ \frac{1}{3} u^3 + u v^2 \Big]_{-\frac{L_v}{2}}^{\frac{L_v}{2}} dv dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \int_{-\frac{L_u}{2}}^{\frac{L_u}{2}} ((\frac{L_u^3}{24} + \frac{L_u}{2}v^2) - (- \frac{L_u^3}{24} - \frac{L_u}{2}v^2)) dv dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \int_{-\frac{L_u}{2}}^{\frac{L_u}{2}} (\frac{L_u^3}{12} + L_u v^2) dv dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \Big[ \frac{L_u^3}{12} v + L_u \frac{1}{3} v^3 \Big]_{-\frac{L_u}{2}}^{\frac{L_u}{2}} dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} (\frac{L_u^3 L_v}{12} + \frac{L_u L_v^3}{12}) dk \\ &= \rho \int_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \frac{L_u L_v}{12} (L_u^2 + L_v^2) dk \\ &= \rho \frac{L_u L_v}{12} (L_u^2 + L_v^2) \Big[ k \Big]_{-\frac{L_k}{2}}^{\frac{L_k}{2}} \\ &= \rho \frac{L_u L_v L_k}{12} (L_u^2 + L_v^2) \\ &= \frac{1}{12} m (L_u^2 + L_v^2) \end{aligned}\] \[\begin{aligned} I_{xx} = \frac{1}{12} m (h^2 + d^2) \\ I_{yy} = \frac{1}{12} m (w^2 + d^2) \\ I_{zz} = \frac{1}{12} m (w^2 + h^2) \end{aligned}\]구의 관성 모멘트
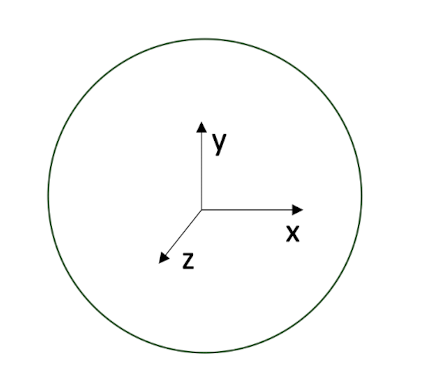
반지름 $r$ 인 구의 회전은 어느 축을 기준으로 회전하더라도 아래와 같이 관성 모멘트를 계산할 수 있다.
질량이 $m$, 반지름이 $R$ 인 구의 밀도 $\rho$ 는 $\frac{m}{\frac{4}{3} \pi R^3}$ 를 가진다.
\[\rho = \frac{m}{\frac{4}{3} \pi R^3}\]중심으로부터의 거리 $r$, $xy$ 평면과의 각도 $\theta$, $z$ 축과의 각도 $\phi$ 를 사용하여 구면 좌표계 $(r, \theta, \phi)$ 를 사용하면, 미소부피 $dV$ 는 $r^2 \sin \phi dr d\phi d\theta$, 적분 구간은 $r$ 에 대해서 $[0, R]$, $\theta$ 에 대해서 $[0, \pi]$, $\phi$ 에 대해서 $[0, 2\pi]$ 이다.
구의 회전축을 $z$ 축으로 가정할 때, 구의 회전축에서의 거리 제곱은 $r^2 \sin^2 \phi$ 이다.
\[\begin{aligned} I_z &= \int \int \int \rho r^2 \cdot \text{distance} \cdot dV \\ &= \int \int \int \rho r^2 \sin^2 \phi (r^2 \sin \phi dr d\phi d\theta) \\ &= \rho \left( \int_{0}^{2\pi} d\theta \right) \left( \int_{0}^{\pi} \sin^3 \phi d\phi \right) \left( \int_{0}^{R} r^4 dr \right) \\ \end{aligned}\]원통의 관성 모멘트
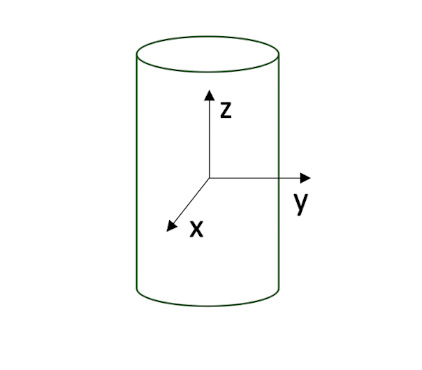
반지름 $R$, 높이 $L$ 인 원통의 회전은 $x$ 축, $y$ 축, $z$ 축을 기준으로만 회전할 때 아래와 같이 관성 모멘트를 계산할 수 있다.
중심축 기준으로 원통을 분석하면, 질량 $m$, 반지름 $R$, 길이 $L$ 인 원통의 밀도 $\rho$ 는 $\frac{m}{\pi R^2 L}$ 를 가진다.
\[\begin{aligned} m &= \rho \cdot \text{Volume} \\ &= \rho \cdot \pi R^2 L \end{aligned}\]중심축($z$ 축) 기준 회전
이렇게 구한 밀도 $\rho$ 를 사용하여 원통의 중심축(길이 방향, $z$ 축)을 기준으로 회전할 때의 관성 모멘트 $I$를 구할 수 있다.
이 때 원통 좌표계 $(r, \theta, z)$ 에서, 적분 구간은, $r$ 에 대해서 $[0, R]$, $\theta$ 에 대해서 $[0, 2\pi]$, $z$ 에 대해서 $[-\frac{L}{2}, \frac{L}{2}]$ 이다.
\[\begin{aligned} I_z &= \int \int \int \rho r^2 dV \\ &= \int_{-\frac{L}{2}}^{\frac{L}{2}} \int_{0}^{2\pi} \int_{0}^{R} \rho r^2 (r dr d\theta dz) \\ &= \rho (\int_{-\frac{L}{2}}^{\frac{L}{2}} dz) (\int_{0}^{2\pi} d\theta) (\int_{0}^{R} r^3 dr) \\ &= \rho \cdot \Big[ z \Big]_{-\frac{L}{2}}^{\frac{L}{2}} \cdot \Big[ \theta \Big]_{0}^{2\pi} \cdot \Big[ \frac{1}{4} r^4 \Big]_{0}^{R} \\ &= \rho \cdot L \cdot 2\pi \cdot \frac{1}{4} R^4 \\ &= \frac{1}{2} \rho \pi L R^4 \\ &= \frac{1}{2} m R^2 \end{aligned}\]중심을 가로지르는 축($x$, $y$ 축) 기준 회전
회전축을 $x$ 로 가정할 때, 임의의 위치 $(x, y, z)$ 에서 $x$ 축까지의 거리 제곱은 $y^2 + z^2$ 이다. 원통 좌표계에서 $y = r \sin \theta$, $z = z$ 이므로, $x$ 축까지의 거리 제곱은 $r^2 \sin^2 \theta + z^2$ 이다.
\[\begin{aligned} y &= r \sin \theta \\ z &= z \\ y^2 + z^2 &= r^2 \sin^2 \theta + z^2 \end{aligned}\]첫 번째 항 $r^2 \sin^2 \theta$ 는 원통의 중심축에서 멀어지는 정도에 따른 회전 저항을 나타내고, 두 번째 항 $z^2$ 는 원통의 중심에서 멀어지는 정도에 따른 회전 저항을 나타낸다.
\[\begin{aligned} I_x &= \int \int \int \rho (r^2 \sin^2 \theta + z^2) dV \\ &= \int_{-\frac{L}{2}}^{\frac{L}{2}} \int_{0}^{2\pi} \int_{0}^{R} \rho (r^2 \sin^2 \theta + z^2) (r dr d\theta dz) \\ \end{aligned}\]두 번째 항 $z^2$ 는 $\theta$ 와 $r$ 에 대해서는 상수이므로, $z^2$ 항에 대한 적분은 다음과 같이 계산할 수 있다.
\[\begin{aligned} \rho \int_{-\frac{L}{2}}^{\frac{L}{2}} z^2 dz \int_{0}^{2\pi} d\theta \int_{0}^{R} r dr &= \rho \Big[ \frac{1}{3} z^3 \Big]_{-\frac{L}{2}}^{\frac{L}{2}} (2 \pi) (\frac{1}{2} R^2) \\ &= \rho (\frac{L^3}{12})(\pi R^2) \\ &= \frac{1}{12} (\rho \pi L R^2) L^2 \\ &= \frac{1}{12} m L^2 \end{aligned}\]두 항의 적분을 모두 계산하고 한 데 정리하면 다음의 원통의 관성 모멘트를 얻을 수 있다.
\[\begin{aligned} I_x = I_y &= \frac{1}{4} m R^2 + \frac{1}{12} m L^2 \\ &= \frac{1}{12} m (3R^2 + L^2) \end{aligned}\]정리 결과
\[I_{xx} = I_{yy} = \frac{1}{12} m (3R^2 + L^2)\] \[I_{zz} = \frac{1}{2} m R^2\]외부의 특정 점에서 강체에 힘을 가할 때의 처리
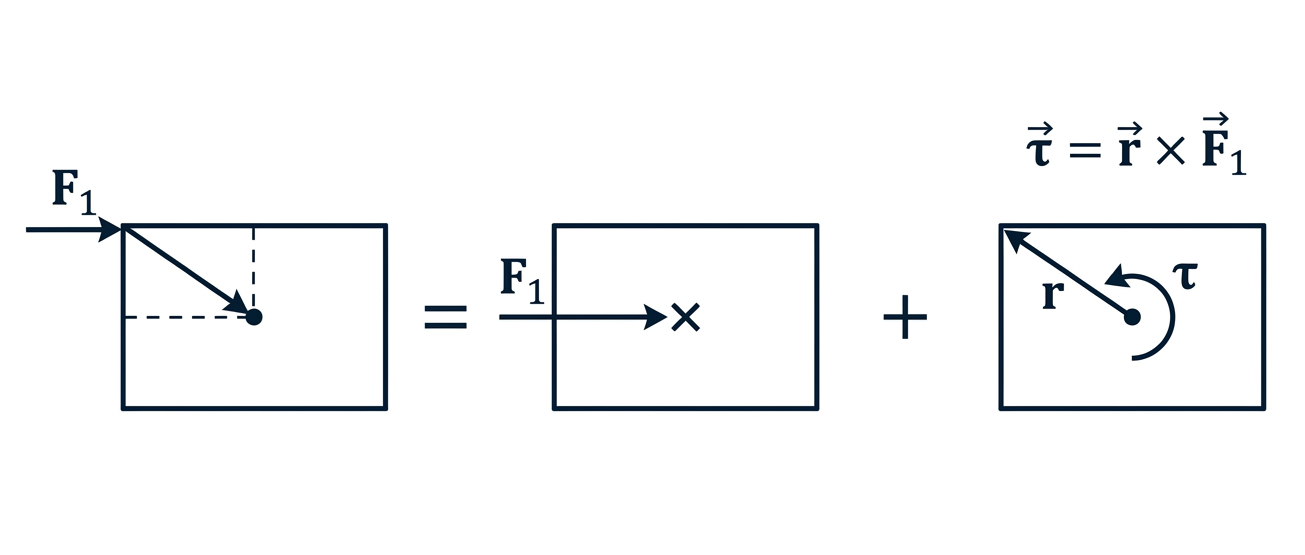
강체에 외부에서 힘이 가해질 때, 그 힘이 가해지는 위치에 따라서 강체의 병진 운동과 회전 운동이 모두 발생할 수 있다. 이 대 병진 운동과 회전 운동에 관해서는 각각 처리하여 대응할 수 있다.
외부에서 가해진 힘 $f$ 는 도입에서 언급했듯, 작용점의 위치와 무관하게 강체의 질량 중심에 직접 작용하는 것으로 가정한다.
\[a = \frac{1}{m} \cdot f\]토크는 질량 중심이 아닌 위치에 힘이 가해졌을 때 발생한다. 토크 $\tau$ 는 질량 중심에서 작용점으로의 위치 벡터 $r$ 와 가해진 힘 $f$ 의 외적으로 구할 수 있다. 이렇게 구한 토크 $\tau$ 는 각가속도 $\alpha$ 를 구하는 데 사용될 수 있다.
\[\tau = r \times f\] \[\alpha = I^{-1} \cdot \tau\]